|
Documentation
|
|
Documentation
|
This endpoint gives access to the configuration of the device's inputs and outputs.
path: /api/v1/process
example of the process endpoint:
This object contains the process name and an array with all the IO configurations.
| Variable | Description | datatype | writable |
|---|---|---|---|
| name | The user given name for the process/application | string | yes |
| entries | array containing all the IO configurations | array | - |
This structure holds the configuration for a digital input.
| Variable | Description | datatype | writable | added in typeRevision |
|---|---|---|---|---|
| name | user given name | string | yes | 0 |
| pin | the hardware name of the digital input | string | no | 0 |
| shift | the shift value - see explanation below | integer | yes | 0 |
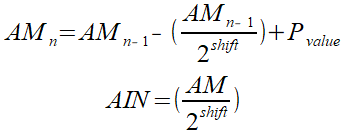
The shift value controls weighted moving average calculation. It is used with time series data to smooth out short-term fluctuations of the digital input. To do this the input is sampled continuously (sampling interval). The period is specified by the system.
A weighted moving average is an average that has multiplying factors (shift value) to give different weights to data at different positions in the sample period. Mathematically, the weighted moving average is the convolution of the datum points with a fixed weighting function:
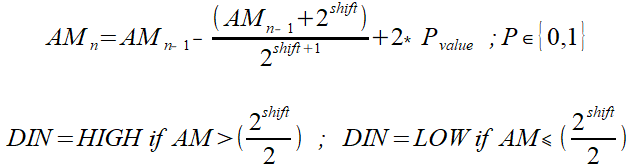
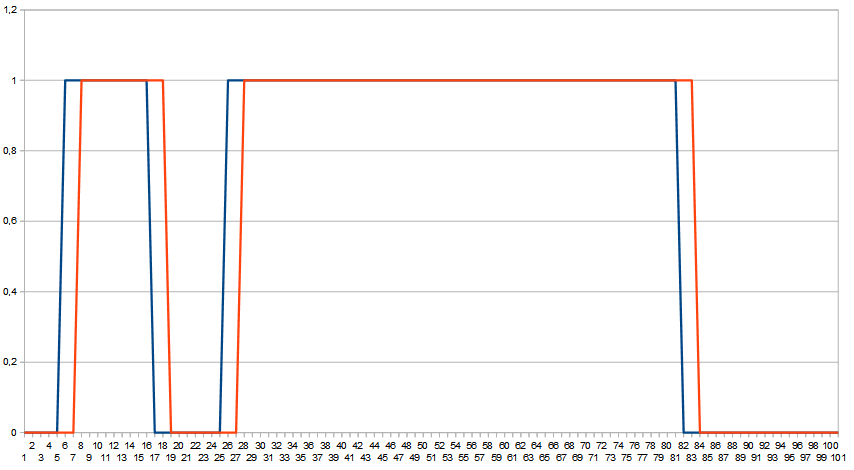
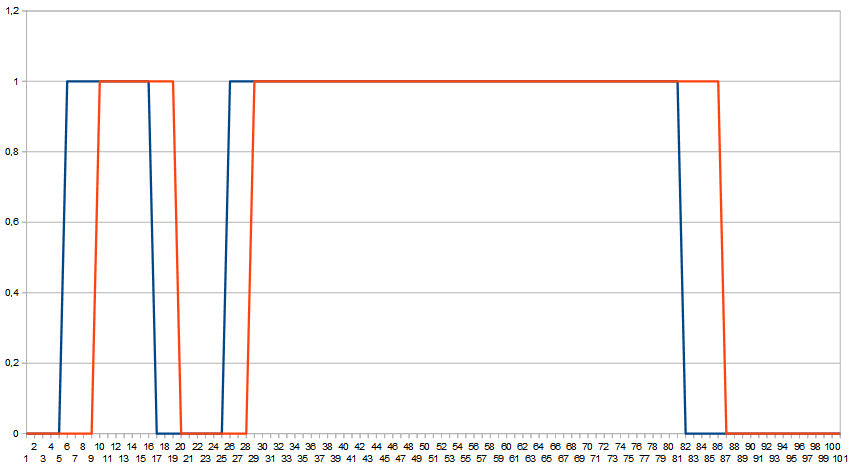
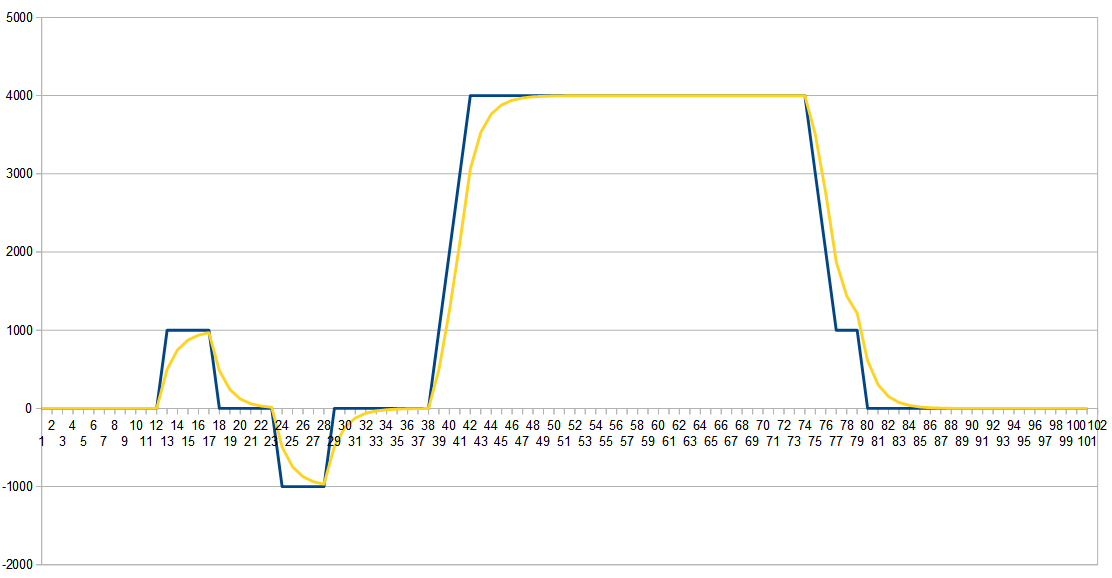
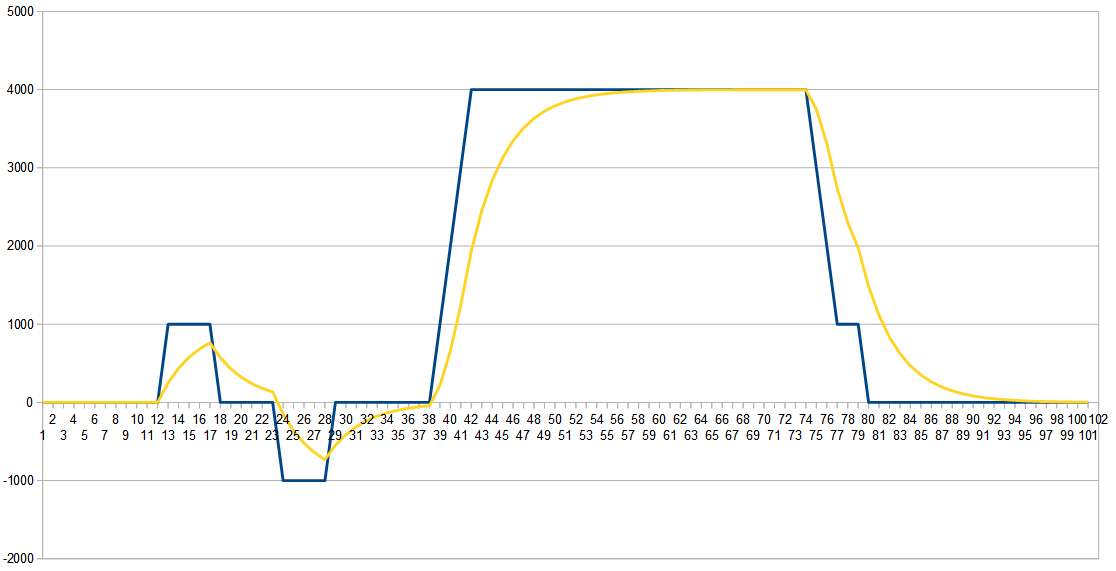
A shift value of 0 will return the input directly. Below you will find some examples over 100 values with different shift values to smooth out short-term fluctuations. The digital input is blue colored and the weighted moving average red.
This structure holds the configuration for a digital output.
| Variable | Description | datatype | writable | added in typeRevision |
|---|---|---|---|---|
| name | user given name | string | yes | 0 |
| pin | the hardware name of the digital output | string | no | 0 |
| pulse | the pulse value - see explanation below | integer | yes | 0 |
| save | the save flag - see explanation below | boolean | yes | 1 |
The pulse value defines the timeout for a monostable digital output. After the output is switched on, the digital output will be automatically switched off after the specified amount of seconds. A pulse value of 0 turns this functionality off <=> the digital output won't be automatically switched off.
The save flag is used for restoring the output state after a reset. If true, a relay for example will be set to the value it had before the reset. If false, the relay will be set to its default state: false.
This structure holds the configuration for a analog input.
| Variable | Description | datatype | writable | added in typeRevision |
|---|---|---|---|---|
| name | user given name | string | yes | 0 |
| pin | the hardware name of the analog input | string | no | 0 |
| unit | The unit of the input's values | string | no | 0 |
| format | min:max of the input's values | string | no | 1 |
| shift | the shift value - see explanation below | integer | yes | 0 |
| hysteresis | the hysteresis value - see explanation below | integer | yes | 0 |
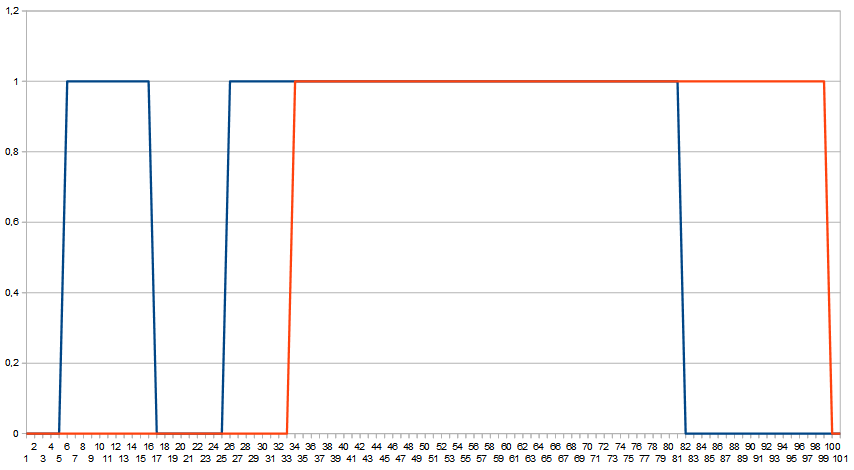
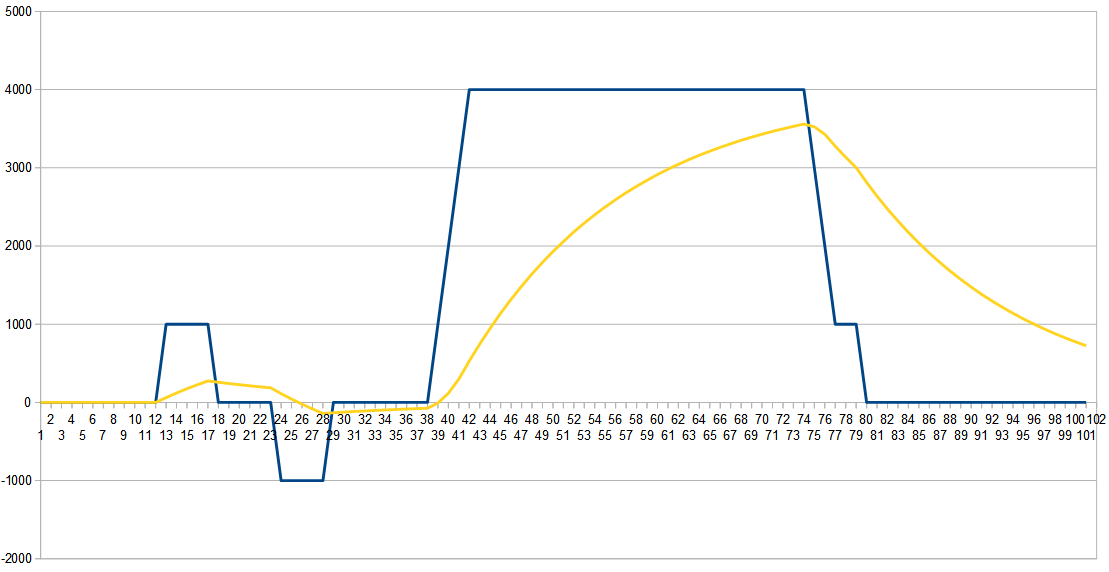
The shift value controls weighted moving average calculation.
See digital input shift explanation for a brief description.
Some examples:
(The input is blue colored and the weighted moving average yellow.)
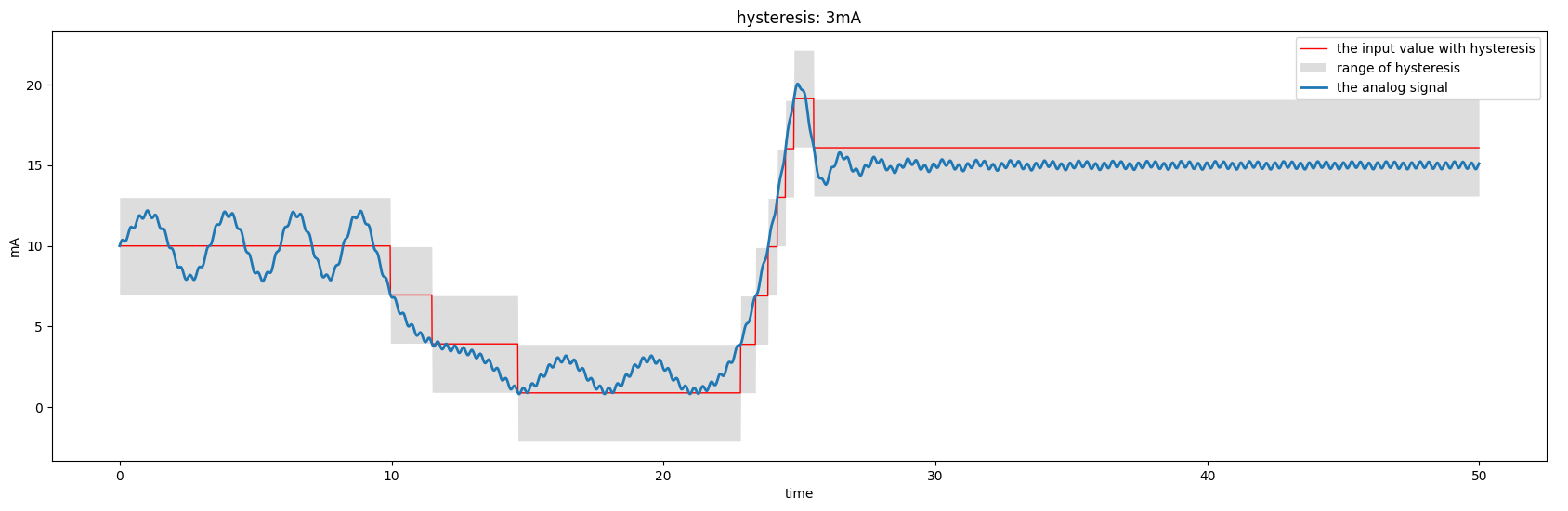
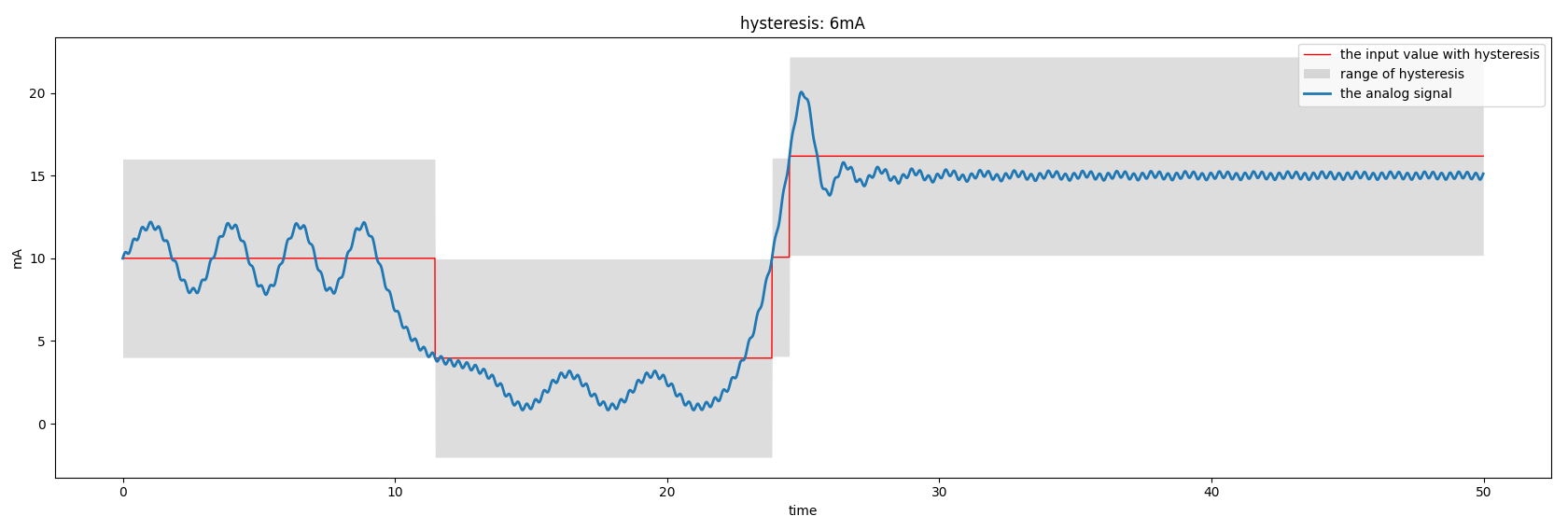
The hysteresis defines a threshold value for a change of the input to be detected. For example: a hysteresis value of 5 means the value of the input will only change to the currently measured value if the difference between the currently measured value and the old value is bigger than or equal to 5. The hysteresis has the same unit as the value itself, so in this listing it would be 5mA.
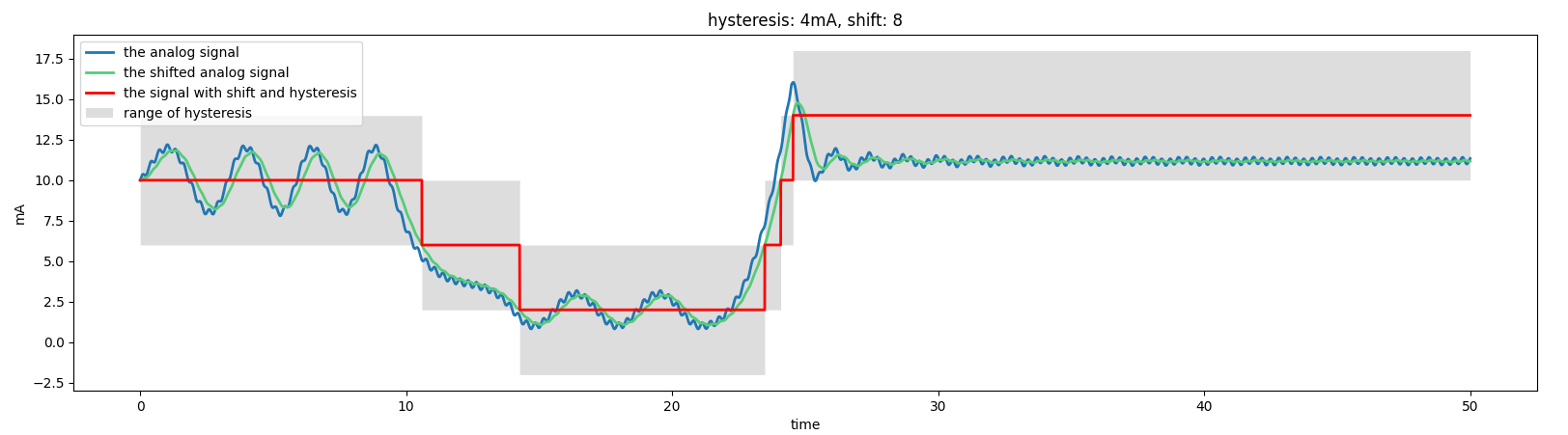
If both, shift and hysteresis are active, the hysteresis will be applied to the weighted moving average.
This structure holds the configuration for an analog output.
| Variable | Description | datatype | writable | added in typeRevision |
|---|---|---|---|---|
| name | user given name | string | yes | 0 |
| pin | the hardware name of the digital input | string | no | 0 |
| unit | The unit of the input's values | string | no | 0 |
| format | min:max of the input's values | string | no | 1 |
| save | the save flag - see here for explanation | boolean | yes | 1 |